Schnellstart mit Docker
Diese Anleitung ist dafür gedacht, schnell in die Eduard Simulation zu starten. Wenn du keine Lust auf die manuelle Einrichtung hast und direkt erste Erfahrungen mit der Simulation starten willst, ist diese Anleitung für dich geeignet. Wenn du lernen willst, wie man seine Linuxumgebung selbst einrichtet, überspringe dieses Kapitel und beginne mit "Plattformunabhängige Installation mit Docker".
Die folgenden Quickstart-Anleitungen sind Betriebssystemunabhängig, um die Einrichtung von Ubuntu auf dem eigenen Betriebssystem oder als Virtuelle Maschine zu vermeiden. Für Linuxnutzer empfielht es sich, die "normale" Installation zu verwenden (Weiter bei ROS Workspace anlegen).
Voraussetzungen
- Vorhandener Github Account mit hinterlegtem SSH Key für
git clone - Git installiert, auf Mac meist automatisch, auf Windows muss es runtergeladen werden
- SSH Key anlegen mit der EduArt Anleitung
- Offizielle Github Anleitung
Benötigte Software
- Docker Hub , installiert, AGBs akzeptiert und mal geöffnet
optional
- VNC Viewer installiert
- Visual Studio Code installiert
Installation
- Erstelle einen Ordner "EduArt" in deinen Dokumenten. Nenne ihn wirklich "EduArt", sonst funktionieren die folgenden Befehle nicht.
- Öffne den Ordner EduArt im Dateimanager
Auf Mac:
- Rechtsklick auf den Ordnernamen in der Pfadleiste unten und "in Terminal öffnen"
Auf Windows:
- Rechtsklick "in PowerShell öffnen" oder "in Terminal öffnen"
im Terminal:
- mit
cdin den Ordner rein navigieren, z.B.
cd Documents/EduArt
- enter drücken
Terminal öffnen und folgenden Befehl eingeben:
git clone git@github.com:EduArt-Robotik/edu_simulation_quickstart.git
- wenn hier was von "authentication failed" steht, ist der Github SSH Key nicht richtig angelegt
Wenn das Repo dann fertig geklont ist
cd edu_simulation_quickstart
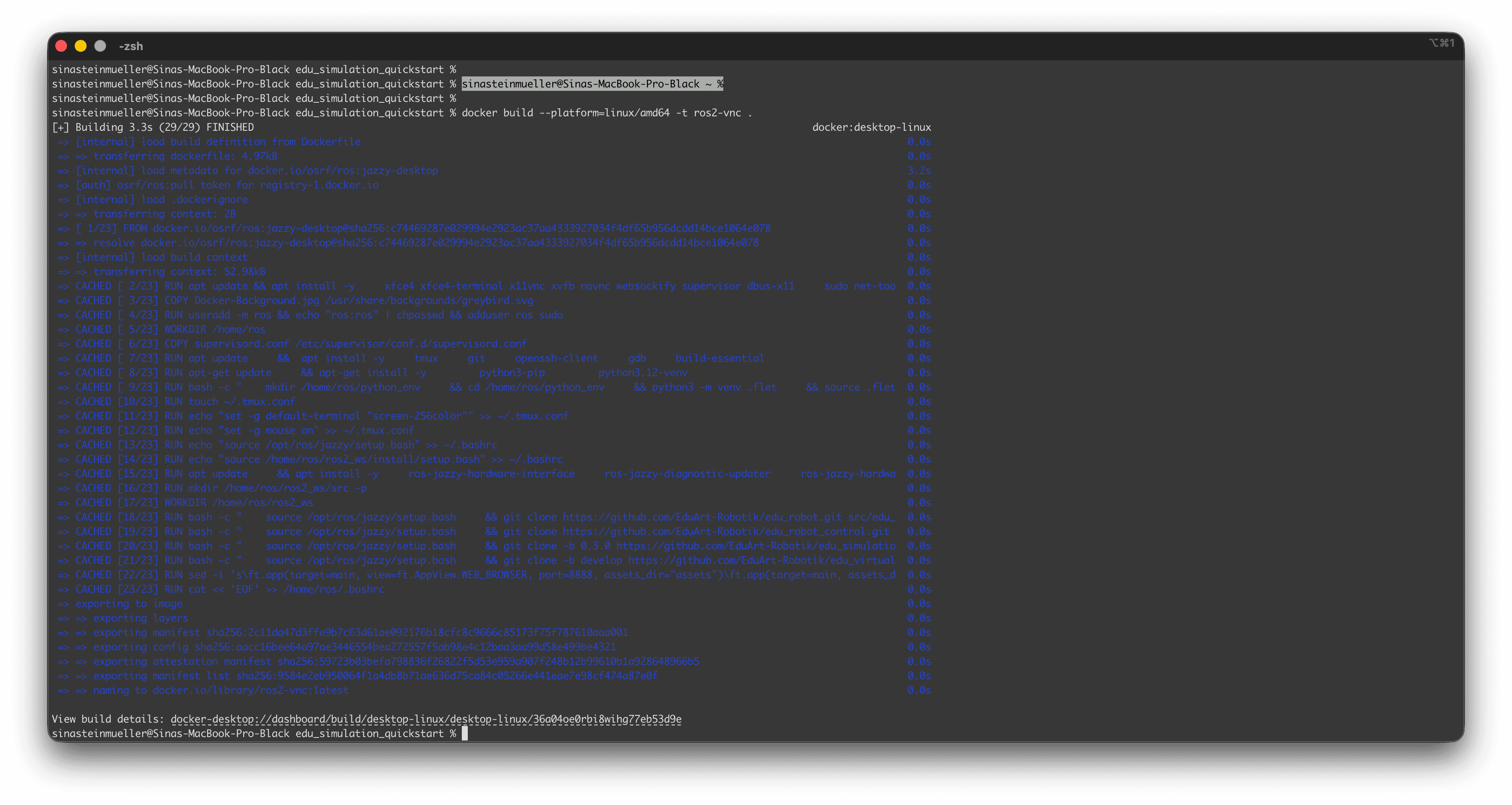
Dockercontainer bauen (dauert je nach Computer und Arbeitsspeicher zwischen 3 und 20 min).
docker build --platform=linux/amd64 -t ros2-vnc .
- Bei Änderungen im Dockerfile oder in der Supervisord.config muss immer neu gebaut werden. Änderungen können Beispielsweise das Hintergrundbild im Container oder die Bildschirmauflösung sein.
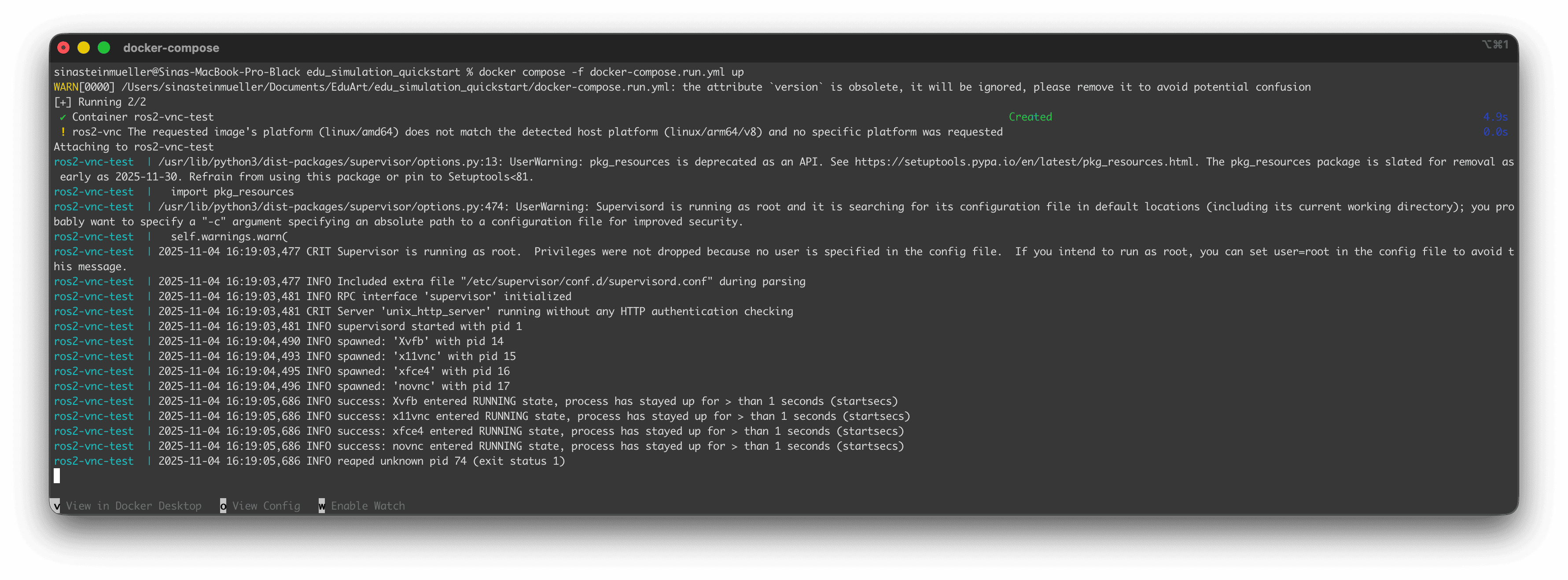
Wenn der Container erfolgreich gebaut ist, den Dockercontainer starten:
docker compose -f docker-compose.yml up
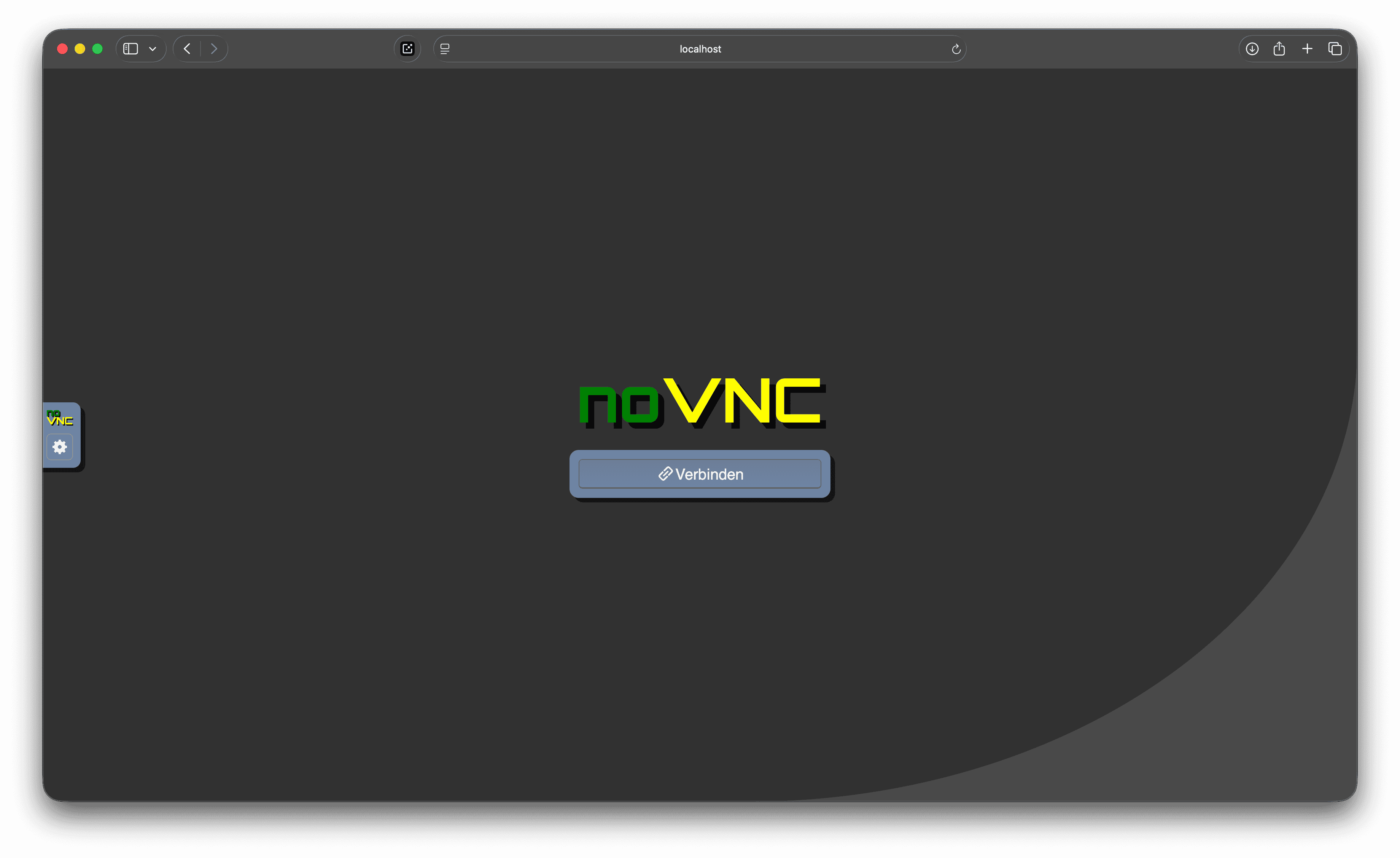
Danach im Browser öffnen: http://localhost:8080/vnc.html und auf "Verbinden klicken"
Optional in VNC Viewer integrieren
- VNC Viewer (oder alternative Software) öffnen
- Datei / Neue Verbindung / localhost:5900
Tipps
- Copy + Paste über die noVNC Seitenleiste links
Simulation starten
Terminal in Simulation öffnen. Folgenden Befehl eingeben, dann öffnet sich automatisch ein 4-geteiltes Terminalfenster mit 4 Kommandos.
start-simulation.sh
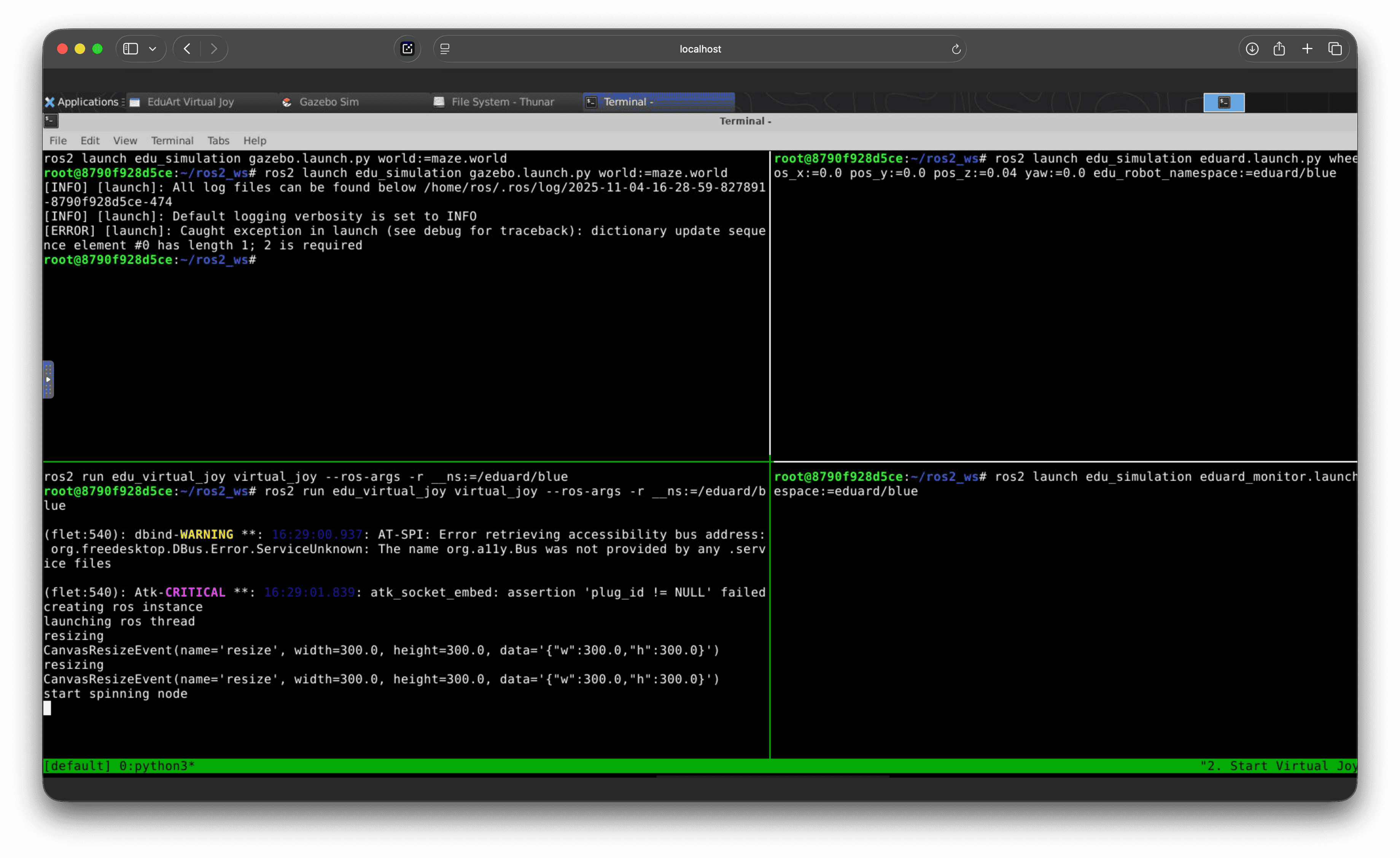
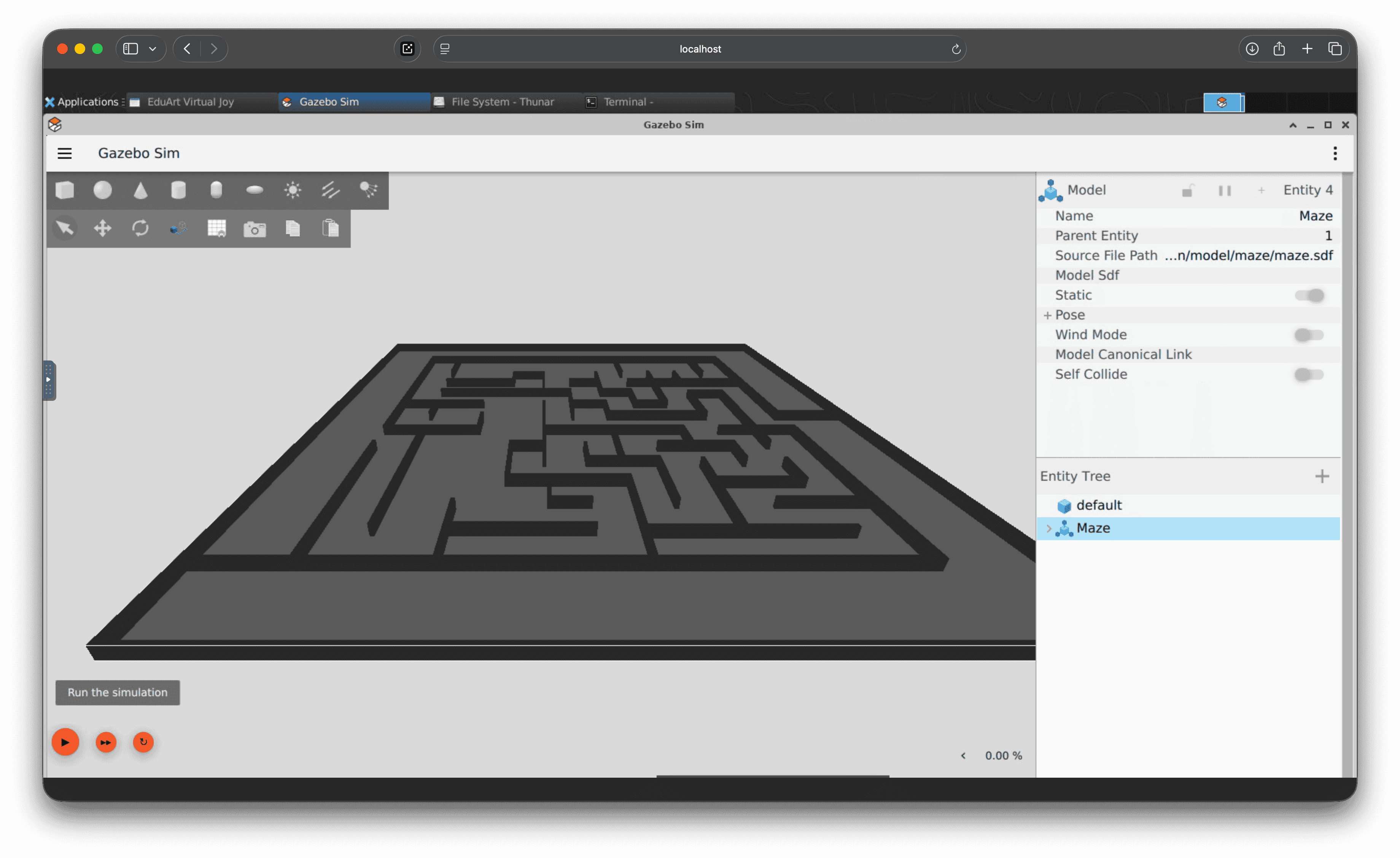
In Fenster 1, links oben, startet das Programm "Gazebo", das ein Labyrinth zeigt. Hier ist Links unten ein Button "Run the simulation", diesen drücken.
In Fenster 2, links unten, startet der Virtuelle Controller für den Roboter.
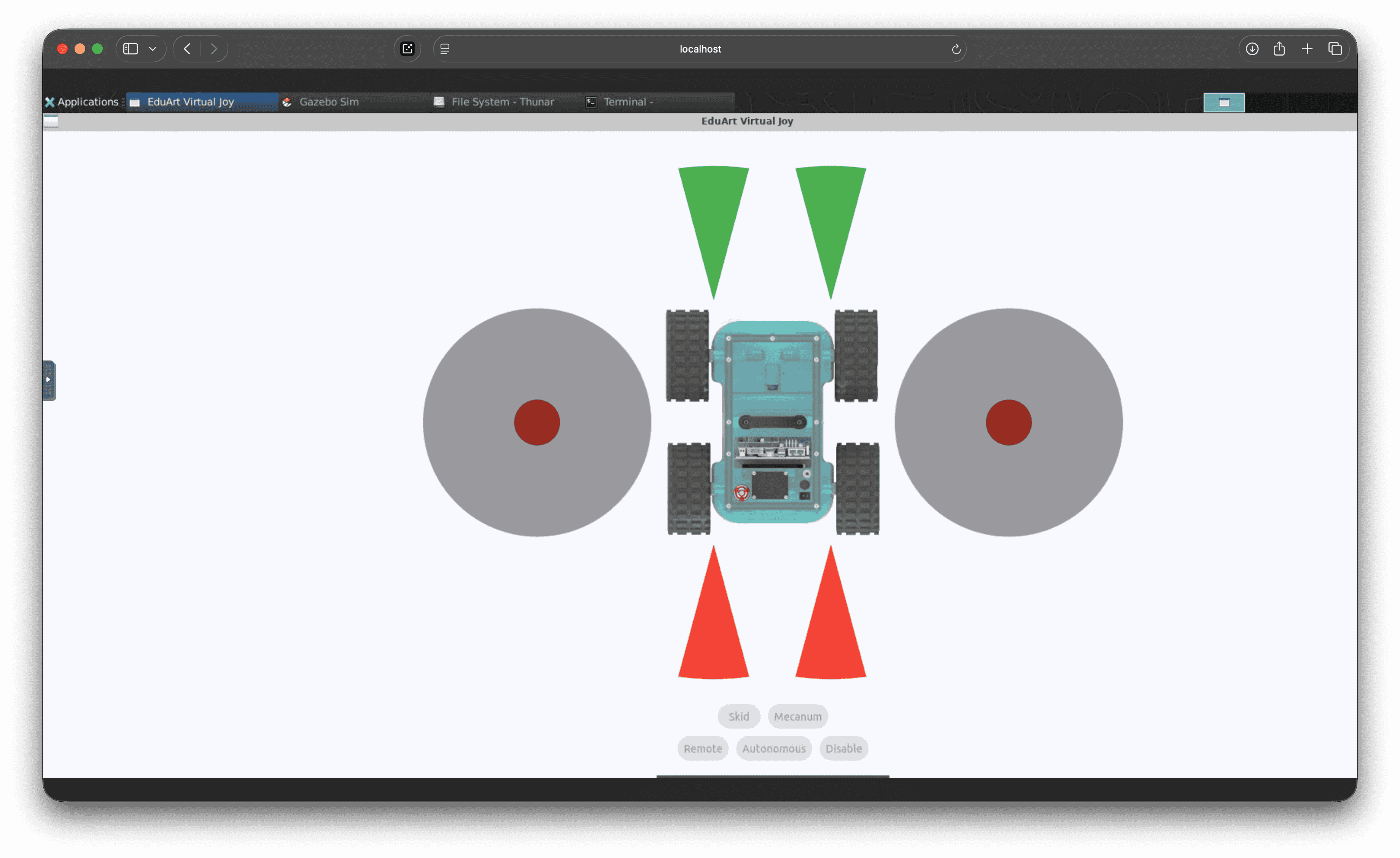
Fenster 3, rechts oben, platziert einen blauen Eduardroboter im Labyrinth in Fenster 1. Wenn du die Simulation in Fenster 1 gestartet hast, klicke in dieses Terminalfenster (rechts unten in der grünen Leiste steht dann der Name des Fensters "3. Add Eduard"). Drücke Enter, dann ist der blaue Roboter im Labyrinth. Skaliere das Fenster ggf., sodass du die Buttons unten siehst und drücke "Remote". Erfolgreich, wenn der Button grün wird. Dann kannst du mit dem linken Joystick fahren und mit dem rechten Joystick dich drehen.
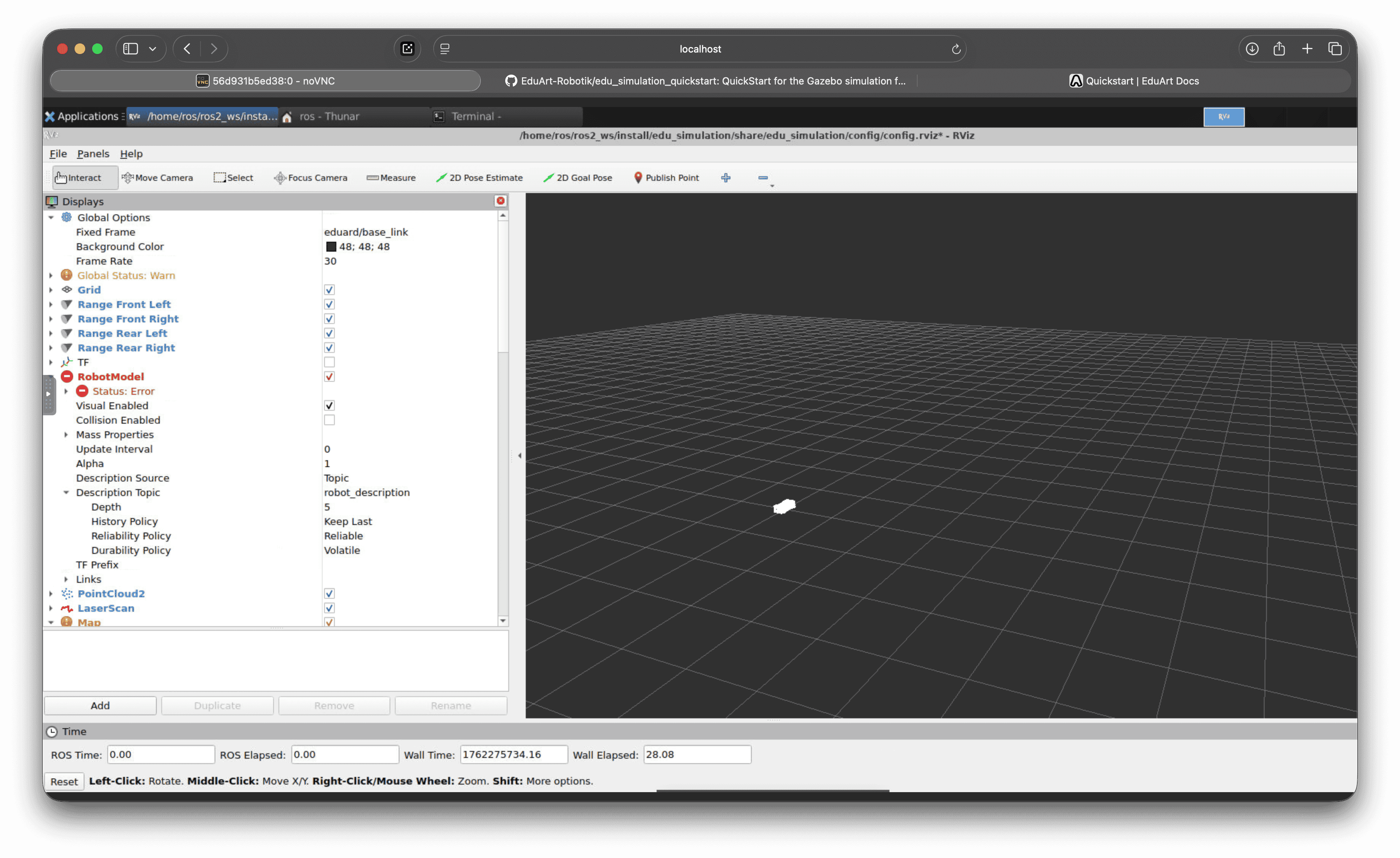
Optional: Fenster 4 öffnet das Monitoring in RVIZ.
Troubleshooting
Fehler: ✘ ros2-vnc Error pull access denied for ros2-vnc, repository does not exist or may require 'docker login' oder: if container already exists:
docker compose -f docker-compose.run.yml down
und danach dann
docker compose -f docker-compose.run.yml up
Fehler ERROR: Cannot connect to the Docker daemon at unix:///Users/sinasteinmueller/.docker/run/docker.sock. Is the docker daemon running?
- Docker Desktop App starten
Bildschirmauflösung passt nicht (Containerinhalt zu klein, zu groß oder abgeschnitten): in der supervisord.config Datei die Zeile command=/usr/bin/Xvfb :0 -screen 0 1920x900x24 mit der gewünschten Bildschirmanpassung ändern, z.B. in 1280x1024x24
Tipps
Bildschirmgröße des Containers ändern
- In Datei
supervisord.confim geklonten Repo in folgender Zeile
command=/usr/bin/Xvfb :0 -screen 0 1920x900x24
Hintergrundbild ändern
- Vor dem Bauen des Containers das Aktuelle Hintergrundbild
Docker-Background.svgdurch die neue, gewünschte SVG (!) Datei ersetzen - Repo neu bauen und starten